A new publication named “Trajectory Planning of a Moving Robot Empowers 3D Localization of RFID Tags with a Single Antenna." has been published in the IEEE Journal of Radio Frequency Identification.
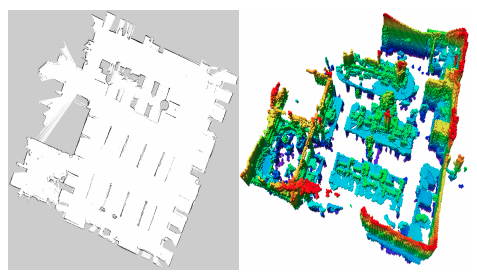
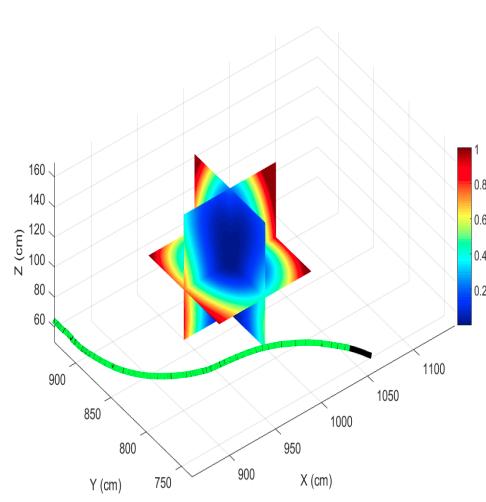
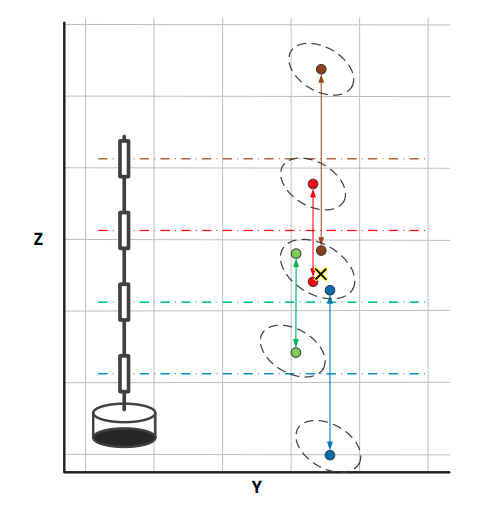
In this work, we present a method for 3D localization of RFID tags by a reader-equipped robot with a single antenna. The robot carries a set of sensors, which enable it to create a map of the environment and locate itself in it (Simultaneous Localization and Mapping -SLAM). Then we exploit the collected phase measurements to localize large tag populations in real-time. We show that by forcing the robot to move along non-straight trajectories, thus creating non-linear synthetic apertures, the circular ambiguity of the possible tag’s locations is eliminated and 3D localization is accomplished. A reliability metric is introduced, suitable for real-time assessment of the localization error. We investigate how the curvature of the robot’s trajectory affects the accuracy under varying multipath conditions. It is found that increasing the trajectory’s slope and number of turns improves the accuracy of the method. We introduce a phase model that accounts for the effects of multipath and derive the closed form expression of the resultant’s phase probability density function. Finally, the proposed method is extended when multiple antennas are available. Experimental results in a “multipath-rich" indoor environment demonstrate a mean 3D error of 35cm, achieved in a few seconds.
Related projects: RELIEF